Ma première conclusion est une généralité: une situation de contrôle est limitée dans le temps et dans l’espace. Si vous êtes en situation de contrôle vous devez accepter de perdre progressivement votre avantage et cela doit vous motiver à chercher à augmenter votre avantage, pas simplement à le gérer. De plus il n’existe pas qu’une seule définition du contrôle, celui-ci peut s’exercer de différentes manières, laissant différentes latitudes au pilote sous contrôle.
Archives de catégorie : Préparation tactique

Théorie du contrôle développée par le Pôle Espoir
L’objet de cet article rédigé par l’équipe du Pôle Espoir de Font-Romeu est la conceptualisation mathématique du contrôle en parapente dans un cas (presque…) général.
Avant d’entrer dans nos élucubrations mathématiques, il convient déjà de définir en bon français ce qu’est le contrôle en parapente. Nous aimons dire: “La capacité à revenir à la verticale de l’adversaire le plus proche du but avant qu’il ne passe la ligne ou l’arrêt des points temps.”
C’est la définition à minima d’un match nul contre le meilleur de la manche du jour.
De cette affirmation et pour le confort de notre démonstration nous choisissons dans un premier temps de nous intéresser uniquement à un cas général ne prenant pas en compte la ligne d’arrivée (on verra plus tard). Nous choisissons aussi de considérer deux pilotes que l’on nommera A et B en nous plaçant dans le cas où A veut exercer un contrôle sur B. Il se déplace toujours dans sa direction. De sorte qu’une dimension de l’espace est négligeable puisque les pilotes évoluent toujours dans le même plan.

Théorie du contrôle généralisé
Les deux exemples précédents nous ont permis de prendre conscience que la notion de contrôle de A sur B dépend de la vitesse que va adopter A et de l’éventualité pour B de trouver un thermique chemin faisant.
Nous avons pris pour hypothèse que nos pilotes adoptaient un comportement rationnel. Cependant la rationalité est bien souvent une question personnelle, d’autant plus que nous pratiquons un sport bien peu rationnel dans un milieu à incertitude absolue. Nous allons généraliser la construction du contrôle lâche en laissant la liberté à chaque pilote d’adopter la vitesse qu’il souhaite.
Pour ne pointer personne en particulier, prenons un couple de top pilotes pour incarner les impétrants A et B: Hameau tente de se faire la malle par le bas tandis que Pinard le surveille perché en retrait. Messieurs Hameau et Pinard n’ont que faire des théories sur la vitesse optimale. Ils les trouvent intéressantes pour le vol libre mais sans grand intérêt en contexte de compétition. Alors ils mettent tout à bloc et soudent les poulies dans leur transition. Ou pas. C’est leur analyse qui guide leur régime de vol individuel.
Conservons l’hypothèse que ce thermique a le bon goût d’être à la Vz MacCready espérée.

Théorie du contrôle lâche
Dans le cas présenté aujourd’hui, le pilote B adopte une vitesse de transition optimale. Celle-ci, comme l’aura retenu le lecteur assidu et attentif, varie en fonction de l’altitude entre vitesse de finesse maximum et une valeur un peu supérieure à la vitesse MacCready, laquelle est déterminée par le taux de montée espéré dans le prochain thermique. Mais comme le pilote B n’a pas encore lu les bons bouquins et que j’ai besoin de simplifier mes équations, nous dirons qu’il vole à vitesse constante, et donc à la vitesse MacCready.

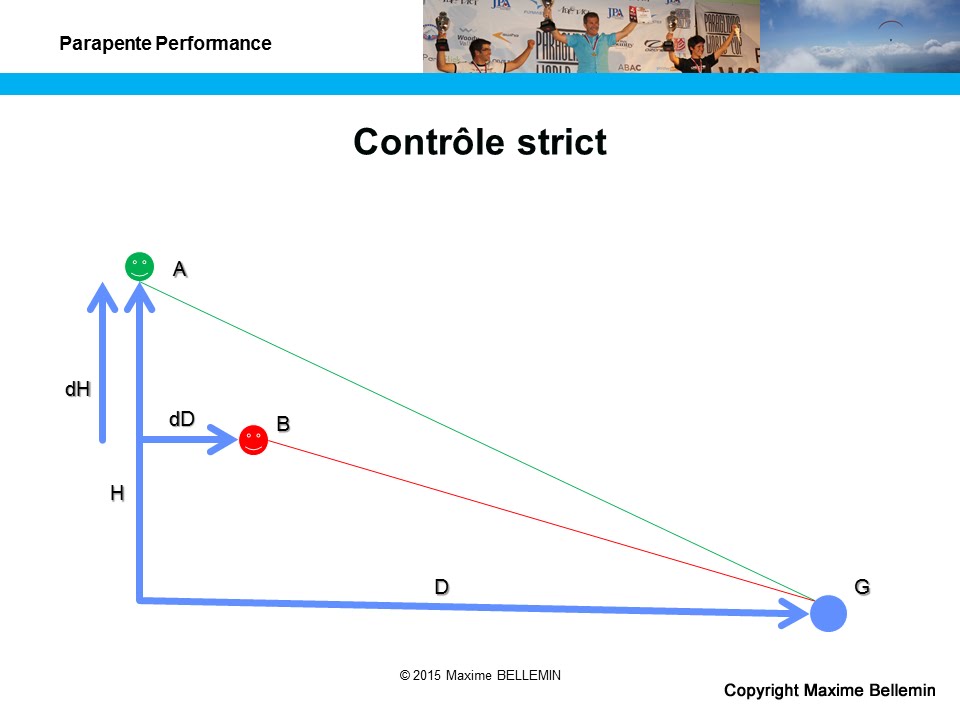
Théorie du contrôle strict
Dans ce cas, le pilote A souhaite exercer un contrôle strict sur le pilote B. Il va voler plus vite que lui pour être sûr de le chapeauter avant que son adversaire n’ait la moindre chance de trouver un thermique. Le pilote A cherche donc à rattraper le pilote B plus loin et plus bas sur le parcours.